Dynamic vs. Static Torque: What’s the Difference and Why It Matters
TIME: 2026.05.15AUTHOR: Carol LiNUMBER OF VIEWS 601
Dynamic vs. Static Torque: What’s the Difference and Why It Matters | Galoce
Published on: | Author: Galoce Torque Measurement Team
Torque isn’t always the same. A bolt being tightened by hand and a spinning motor shaft both involve twisting forces – but the way you measure those forces is completely different. Understanding the difference between static torque and dynamic torque is essential for test engineers, quality control staff, and anyone using torque tools. Pick the wrong sensor and you’ll get inaccurate data – or no data at all. This guide explains the definitions, measurement methods, real‑world examples, and a simple rule to choose the right sensor.
Static Torque – Holding Still
Static torque is the twisting force applied when the shaft or fastener is not rotating – or when the rotation is so slow that you can ignore motion effects.
🔧 Examples:
Using a torque wrench to tighten a bolt.
Checking the torque of an already tightened screw with a dial wrench.
Measuring the force needed to hold a door handle while the door is stationary.
Static torque is relatively easy to measure because the sensor doesn’t need to rotate. You can use a reaction torque sensor (also called a static torque sensor), which is mounted to a stationary part – for example, a torque arm fixed to the housing of a motor or a wrench adapter.
💡 Key advantage: Static torque sensors are simple, affordable, and have no moving electrical contacts. They work perfectly for calibrating tools, quality spot checks, and assembly verification.
Dynamic Torque – While It’s Spinning
Dynamic torque is the twisting force measured while the shaft is continuously rotating. Think of an engine running on a dynamometer, a drill driving a screw, or a conveyor belt drive in motion.
⚙️ Examples:
Measuring the output torque of an electric motor at 3000 rpm.
Monitoring torque during a screw driving process (real‑time, as the screw spins in).
Testing the torque ripple of a gearbox under load.
Dynamic torque is harder to measure because the sensor must rotate with the shaft, and the signal must be transmitted without wires wrapping around. Most dynamic torque sensors use rotary transformers or telemetry (radio) to send data from the spinning shaft to a stationary receiver.
📈 Dynamic torque often contains peaks and fluctuations. You may need to capture both the average torque (e.g., for efficiency calculation) and peak torque (e.g., for overload detection).
Why the Difference Matters
Using the wrong sensor type leads to wrong data – or no data at all.
If you try to measure dynamic torque with a static (reaction) sensor, the sensor’s cable will twist and break the first time the shaft rotates.
If you use a dynamic (rotary) sensor for a static application, you’re paying for expensive rotating electronics that you don’t need.
Even if the sensor mechanically fits, the signal conditioning and sampling rates differ: dynamic torque requires higher bandwidth (often >1 kHz) to capture fluctuations, while static torque can be measured with slow sampling.
💡 Simple rule: Before buying a torque sensor, ask yourself: “Will the shaft be rotating during measurement?”
– If NO → static torque sensor (reaction type).
– If YES → dynamic torque sensor (rotary type).
How to Measure Each Type
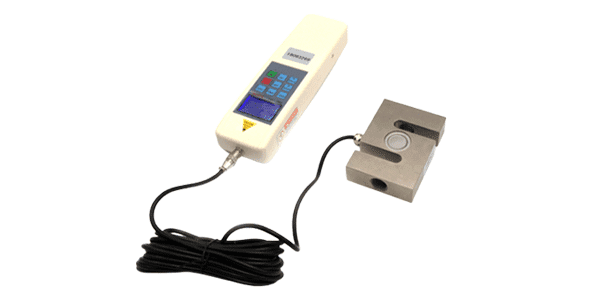
🔧 Static (Reaction) Torque Sensor
How it works: One end of the sensor is fixed to a stationary object (e.g., torque arm, housing). The other end reacts against the twisting motion. No rotation occurs.
Installation: Inline between a stationary support and the torque source. Example: between a motor housing and a concrete floor.
Pros: Low cost, no moving parts, no signal transmission issues.
Cons: Cannot measure while shaft is rotating.
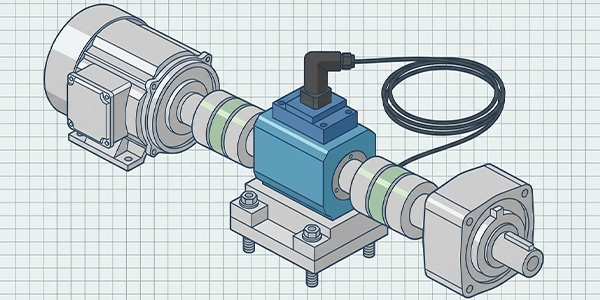
🔄 Dynamic (Rotary) Torque Sensor
How it works: The sensor is inserted into the rotating shaft itself. Strain gauges inside measure twist, and the signal is sent via non‑contact rotary transformer or RF telemetry.
Installation: Flanged or shaft‑to‑shaft coupling between motor and load.
Pros: Measures real‑time torque at speed; captures peaks and oscillations.
Cons: More expensive; requires careful alignment and balancing.
Real‑World Examples (Static vs. Dynamic)
🏭 Example 1 – Torque Wrench Calibration (Static)
A calibration lab uses a static torque sensor mounted on a bench. The technician places the torque wrench on the sensor’s square drive and pulls until the wrench clicks. The sensor reads the peak static torque – this is a spot check, not a dynamic process.
⚡ Example 2 – Electric Motor Efficiency Test (Dynamic)
An engineer installs a rotary torque sensor between the motor and a brake. The motor runs at 1500 rpm. The sensor continuously outputs torque and speed, allowing the engineer to calculate mechanical power and efficiency. This is dynamic torque measurement.
🔩 Example 3 – Assembly Line Screw Driving (Dynamic)
A power tool drives screws into a product. A rotary torque sensor in the tool’s spindle records torque versus angle in real time. The system rejects screws that don’t reach the target torque – dynamic monitoring ensures process control.
Quick Comparison Table
Characteristic
Static Torque
Dynamic Torque
Shaft rotation?
No (stationary)
Yes (continuous rotation)
Sensor type
Reaction (static) torque sensor
Rotary (dynamic) torque sensor
Signal transmission
Wired directly (no rotation)
Non‑contact (rotary transformer or telemetry)
Typical bandwidth
Slow (≤100 Hz) – enough for manual processes
High (≥1 kHz) – captures dynamic peaks
Cost
Lower (simple construction)
Higher (complex electronics)
Common applications
Torque wrench calibration, bolt auditing, reaction force measurement
The difference between static and dynamic torque is not just academic – it determines which sensor you need and how you interpret the data. Static torque is measured when nothing is moving; dynamic torque is measured in real time while the shaft rotates. Each serves a different purpose: static for calibration and spot checks, dynamic for process monitoring and efficiency testing.
Before you buy or specify a torque sensor, always ask the fundamental question: “Will the shaft be rotating during the measurement?”
– No → choose a static (reaction) torque sensor.
– Yes → choose a dynamic (rotary) torque sensor with appropriate speed rating and bandwidth.
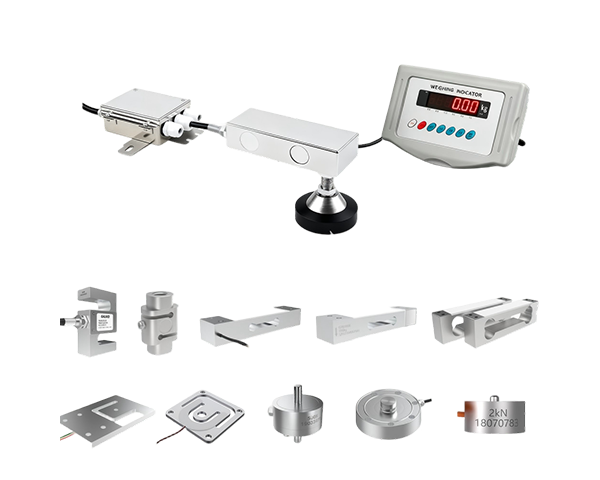
At Galoce, we offer both static and dynamic torque sensors – from compact reaction sensors for bench calibration to high‑speed rotary sensors for motor testing. Discuss your torque measurement application
Discover why GALOCE is the leading load cell manufacturer in China. Offering high-precision force sensors, 26-step quality audits, and global OEM/ODM engineering for US & UK industrial standards. Explore our brand guide.
Master industrial load cell installation with our 2026 handbook. Learn step-by-step mechanical mounting, cable routing, and professional calibration for tension and compression sensors to ensure accuracy and system longevity with GALOCE.