Where 3‑Axis Force Sensors Are Used: From Robotic Hands to Surgical Robots
TIME: 2026.04.23AUTHOR: Carol LiNUMBER OF VIEWS 337
Where 3‑Axis Force Sensors Are Used: From Robotic Hands to Surgical Robots | Galoce
Published on: | Author: Galoce Applications Engineering Team
A robot that cannot feel is blind to its own actions. Traditional robots rely on position control – they know where their joints are, but not how much force they apply. 3‑axis force sensors change that. By measuring forces in X, Y, and Z simultaneously, they give machines a sense of touch, enabling delicate assembly, safe human‑robot collaboration, and even haptic feedback in robotic surgery. This article explores three major application domains – robotics, medical systems, and industrial research – with real‑world examples of how 3‑axis force sensors are transforming each field.
1. Robotics: Giving Machines a Sense of Touch
In robotics, 3‑axis force sensors are most commonly integrated into grippers, wrists, and end‑effectors. They enable five critical capabilities:
Force‑controlled gripping: Adjust grip force to avoid crushing fragile objects (e.g., eggs, glassware).
Slip detection: Detect when an object begins to slip and increase grip automatically.
Precision assembly: Measure insertion forces to confirm snap‑fit or screw tightening.
Deburring and polishing: Maintain constant contact force against irregular surfaces.
Human‑robot collaboration: Sense unintended contacts and stop safely.
🏭 Mini Case Study: Force‑Controlled Robotic Grinding Problem: A manufacturer of turbine blades needed to remove surface imperfections from cast metal parts. Traditional position‑controlled robots either pressed too hard (damaging the part) or too lightly (ineffective grinding). Solution: A 6‑axis industrial arm was equipped with a 3‑axis force/torque sensor at the wrist. The control software used real‑time Fz (normal force) feedback to adjust the robot's approach speed and maintain a constant 15 N contact force, while Fx and Fy monitored lateral forces to avoid edge gouging. Result: Cycle time reduced by 35%, scrap rate dropped from 12% to 2%, and tool life increased by 50% due to consistent loading.
Beyond industrial arms, 3‑axis sensors are also found in dexterous robotic hands (e.g., Shadow Hand, Allegro Hand) where each finger tip contains a miniature multi‑axis sensor to enable delicate manipulation of irregular objects.
2. Medical: Force Feedback in Surgery and Rehabilitation
In medical robotics, force sensing is not a luxury – it is a safety and performance requirement. 3‑axis sensors enable two primary functions:
Surgical haptics: Restore the sense of touch that surgeons lose when operating remotely or through small incisions.
Rehabilitation monitoring: Measure patient interaction forces to adjust therapy robots and track recovery.
🔬 Mini Case Study: Haptic Feedback for Laparoscopic Surgical Robots Problem: In robotic‑assisted minimally invasive surgery (e.g., da Vinci system), surgeons operate from a console with no direct force feedback. They cannot feel tissue tension or accidental collisions, increasing the risk of tissue damage. Solution: A miniature 3‑axis force sensor (diameter < 8 mm) was integrated into the jaws of a laparoscopic grasper. The sensor measured Fz (grip force) and Fx/Fy (lateral pulling forces). These signals were mapped to haptic vibration motors in the surgeon’s hand controls – gentle vibration for light contact, stronger feedback for excessive force. Result: In trials, surgeons using force feedback reduced peak grasping forces by 63% and reported significantly higher confidence during delicate dissection. The sensor also enabled automatic warning when forces approached tissue damage thresholds.
Other medical applications include prosthetic hands (force feedback for amputees), dental implant surgery (prevent jawbone overloading), and rehabilitation exoskeletons (measure patient effort to adapt assistance levels).
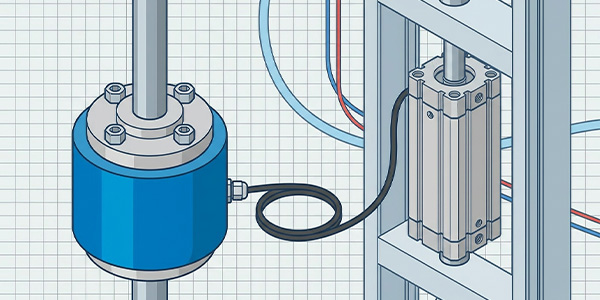
3. Industrial & Research: Precision and Measurement
Beyond traditional robotics, 3‑axis force sensors serve as precision instruments in testing, sorting, and aerodynamic research.
EV battery cell sorting: Measure compressive and shear forces during cell stacking to detect defects.
Wind tunnel testing: 3‑axis sensors measure aerodynamic forces (lift, drag, side force) on scale models.
Biomechanics: Instrumented platforms measure ground reaction forces during gait analysis.
Consumer electronics testing: Simulate finger swipes and presses on touchscreens.
✈️ Mini Case Study: Wind Tunnel Force Balance Application: An aerospace research center needed to measure aerodynamic forces on a 1:10 scale aircraft model at speeds up to 200 km/h. The model was mounted on a sting with a built‑in 3‑axis force sensor (50 kg capacity, 0.1% accuracy). Data captured: Fx (drag), Fy (side force), and Fz (lift) simultaneously at 1 kHz sampling rate. Outcome: Engineers obtained high‑resolution polar curves (lift vs. drag) that correlated perfectly with CFD simulations, enabling rapid design iteration. The same sensor was reused for multiple model configurations using swappable adapters.
Another notable example: EV battery pack assembly. As prismatic cells are compressed into modules, a 3‑axis sensor checks for uniform pressure distribution – any deviation indicates misalignment or swelling cells, preventing potential thermal runaway.
4. Summary Table of Applications
Domain
Application
Forces Measured
Key Benefit
Robotics
Force‑controlled gripping
Fz (grip), Fx/Fy (slip)
No part damage
Precision assembly (peg‑in‑hole)
Fx, Fy (alignment), Fz (insertion)
Automated alignment, jam detection
Deburring / polishing
Fz (normal), Fx/Fy (lateral)
Consistent material removal
Collaborative robot safety
Fx, Fy, Fz (unintended contact)
Force‑limited operation
Medical
Surgical robot haptics
Fz (grasp), Fx/Fy (tissue pull)
Reduced tissue trauma
Rehabilitation exoskeleton
Patient interaction forces
Adaptive assistance
Prosthetic hand feedback
Multi‑axis fingertip forces
Improved dexterity
Industrial & Research
EV battery cell sorting
Compression & shear forces
Defect detection
Wind tunnel force balance
Lift (Fz), drag (Fx), side (Fy)
Aerodynamic characterization
Biomechanics (gait analysis)
Ground reaction forces
Motion analysis
5. Future Possibilities
As sensor miniaturization and edge AI advance, new applications for 3‑axis force sensors are emerging:
Soft robotics: Embed stretchable 3‑axis force sensors into grippers that adapt to arbitrary shapes.
Teleoperation in hazardous environments: Combine force feedback with VR to allow operators to “feel” remote objects.
Smart wearables: Measure interaction forces between a wearable device and the human body (e.g., prosthetic socket pressure distribution).
Automated quality control on production lines: High‑speed 3‑axis force measurement for 100% inspection of snap‑fit or latched assemblies.
🔮 Trend: The next generation of 3‑axis sensors will integrate on‑chip signal processing and wireless communication, making them easy to embed even in low‑cost consumer devices and disposable medical instruments.
6. Conclusion: The Sense of Touch Is No Longer Optional
From the dexterous fingers of a robotic hand to the precise jaws of a surgical robot, 3‑axis force sensors are the missing sense that transforms machines from rigid positioners into intelligent force‑aware systems. Whether you are designing an assembly cell, a rehabilitation exoskeleton, or a wind tunnel balance, the ability to measure Fx, Fy, and Fz simultaneously unlocks new levels of safety, quality, and insight.
At Galoce, we offer a range of miniature and industrial 3‑axis force sensors – from robot wrist sensors to surgical‑grade instruments – backed by application engineering support. Discuss Your Force Sensing Application
Discover why GALOCE is the leading load cell manufacturer in China. Offering high-precision force sensors, 26-step quality audits, and global OEM/ODM engineering for US & UK industrial standards. Explore our brand guide.
Master industrial load cell installation with our 2026 handbook. Learn step-by-step mechanical mounting, cable routing, and professional calibration for tension and compression sensors to ensure accuracy and system longevity with GALOCE.